


1.描述Description:
在歷屆Robocup 機器人大賽中有一個傳統項目就是雙足競步機器人,該項目經過多年的發展,已經成為傳統項目中的經典,參加的隊伍最多,競爭激烈。
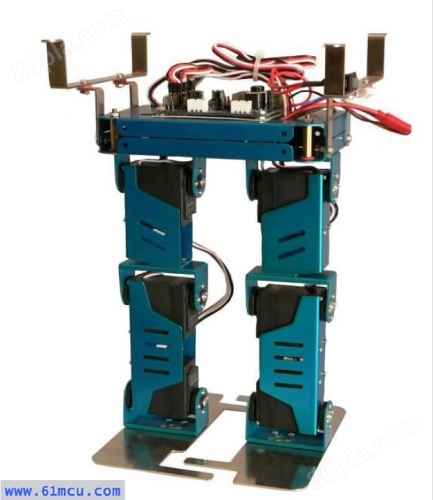
該機器人應采用寬足版結構體,全身由金屬零件構成,具有6個自由度;腰間可以搭載完整的視覺系統;且可以搭載陀螺儀傳感器,可以固定3個陀螺儀,并裝設防撞減震翻滾支撐;腿部采用加長直腿結構,提高行走速度,有利于標準Robocup比賽;腳部采用鋼板材料,增大配重,并可以加裝腳底傳感器,可以進行步態檢測。
該機器人應能完成標準寬足行走,能協助用戶構建完整的寬足行走模型。具有最簡靜平衡步伐方程。
該機器人應能完成高難度動作。如行走、下蹲、倒地、起身、前滾翻、后滾翻等。加裝特種裝置可以完成上樓梯、視覺追蹤等高難度動作。
2、規格Specifications:
- 全身6 個數字伺服馬達,全部采用新型 數字伺服馬達,重量:56g,尺寸40×20×38mm,扭力15kg.cm(7.4v),速度0.18 秒/60 度;6 個可重復定位特制舵盤,與軟件同步實現初始坐標補償。
- 搭載Windows 環境下3D 虛擬仿真編程軟件;
- 支持C 語言和匯編語言混合編程體系,編譯方便;
- 采用ISP 燒寫方式,可燒寫1 萬次以上;
- 中高階學習者可以為該系統增加各種傳感器,例如光強度傳感器、集成溫度傳感器、聲音傳感器、紅外傳感器等;可加裝視覺系統,符合RoboCup 等機器人大賽雙足組標準。滿足用戶的研究與參賽需求。
- 控制板CPU 為STC125A60S2 系列芯片,有22 個輸出端,可以同時聯動控制22 個數字伺服電機;
3.軟件Software:
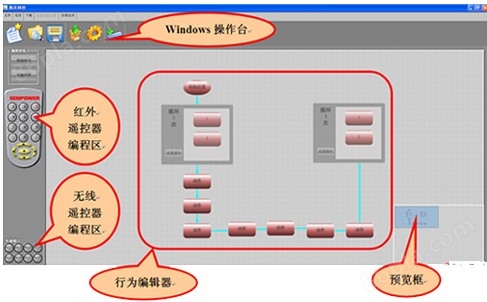
編程軟件除了支持Keil C等常規的單片機開發工具外,還提供了三維圖形化編程軟件(如下圖)。這大大簡化了仿人機器人的編程,使得中小學同學也可以編輯出復雜的機器人動作。
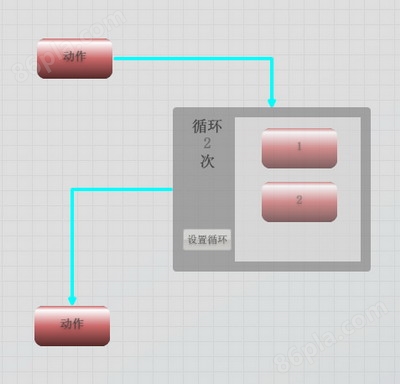
我們首先在軟件里面,確定程序的結構。
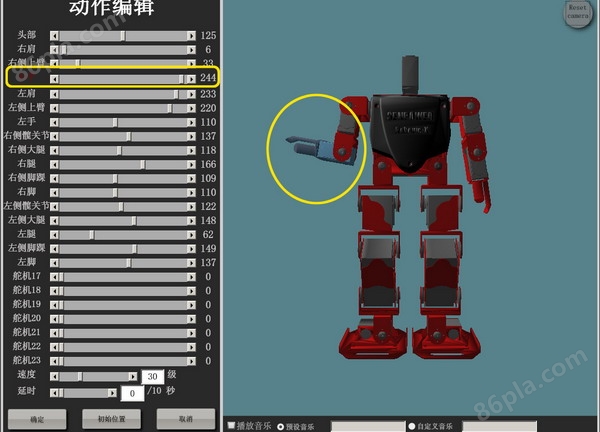
然后我們再編輯每個動作:如上圖,我們可以通過鼠標拽動機器人關節,就可以完成機器人動作的設置。等程序沒有問題,我們點擊下載,就可以寫入機器人控制。機器人就可以完成我們設定的各種動作了。非常簡單。
3D軟件主要機能:
提供動作設定的教學模仿功能,可在PC上用鼠標操作,附具有數種動作實例的正版光盤,可立即測試運作;
1.具有24個自由度。實際組裝時雖只有6個自由度(6ch=6個伺服馬達),但主機板可擴增至24個自由度。也就是說可增加18個自由度。便于DIY用戶增加其他關節機構;
2.具2512kb空間的動作程序存儲器。能夠分別儲存任意的動作模式;
3.電池倉內可以同時安裝2節鋰電池,用來增加續航能力;
4.為了確保機器人在啟動時有敏銳的動作及強而有力的扭轉力,請使用鋰聚合物電池。本機所附的鋰聚合物電池,可讓機器人發揮其功能;
5.具驚人的省電設計,使用時間長達1.2-1.5小時;
6.搭配教學模仿功能呈現出細膩的效果,各個自由度及各個動作的,可利用控制板上的個別滑桿隨心所欲的設定;
7.顯示運轉數據,從動作的位置、速度到變化度,都可利用控制板傳動并定量顯示。每一度動作角度的時,可一面確認數值一面執行;
8.帶有動作間自動插補功能,使動作運轉連續順滑。以一個動作而言,最多可有100個姿勢。在姿勢與姿勢之間會以的速度自動地補齊不的部分。每組最多可記憶80個動作,總共25組;
9.各零件的設計十分精準,只要將螺栓擰進即可組裝完成;
10.編程軟件采用內嵌式三維動畫仿真設計,設計理念及技術水準與國際同步;
11.可以連接國際標準航模遙控器;
電腦軟件平臺:
Window2000、XP,Vista;
CPU建議PentiumIII以上,內存建議1GB以上,顯卡建議采用獨立顯存256MB以上。
5、圖片和視頻Pictures&Videos:

包裝箱,堅固實用美觀

配件清單
6、資源Resource:
有關人形機器人的資料,請到億學通網站/資料下載區查看:/?artlist-206.html
















