



前言:
機械手是指能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置。機械手是出現的工業機器人,也是出現的現代機器人,它可代替人的繁重勞動以實現生產的機械化和自動化,能在有害環境下操作以保護人身安全。
所以學習機械手的控制和使用,對機器人制作和各類機器人競賽有著重要的作用和意義。
機械手臂簡介:
就本產品而言,伺服機器手臂,顧名思義,是由六個伺服電機驅動的機器手臂。既然是手臂,那么就有幾個關節,大家可以聯想到,我們人類的手臂,除了肩、肘、腕這三個關節外,再加上手指的關節,就有很多個關節了。那么我們這個機器手臂也是一樣,用6個伺服電機實現了一個手的簡單結構,除了沒有人那么多的關節外,還缺少一些神經組織和神經系統,然而,具有“靈巧手”(可完成復雜裝配、搬運或仿人手抓取雞蛋)的“仿人形”機器人乃機器人研究的前沿。
而我們的6個伺服機器,以巧妙的機械結構,結合它的控制系統,展示了6自由度機器手動作的控制原理。它采用3個13kg扭力的金屬齒輪、一個3.2kg、兩個2.3kg的伺服和一些精密的鋁合金加工組件組合而成。目前,我公司的機器手臂以390mm長度的為主,使用32路控制器來控制機器手臂的運行動作,本控制器采用atmega168 MCU,和電腦RS232串口通訊,可同時控制32顆伺服電機,雙電源供電(6~12V單片機供電,4.8~6V伺服電機供電[伺服電機供電分別設有1-16路和17-32路供電端口]),同時還設有wi-fi無線控制模塊,預留ISP下載口,用STK500 ISP下載線便可以下載MCU控制程序。
這套機器手臂,無論是robot fans做個人開發還是學生參賽,都是機器人愛好的合適的教育平臺。
夾持器改進說明:
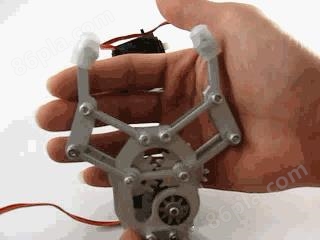
由于夾持器的張開角度和舵機的轉動角度成等比例關系。當手爪加持不同大小的物體時,理想情況是,舵機可以根據不同物體的大小而改變自動改變角度以適應物體大小。但由于舵機手爪沒有壓力檢測傳感器反饋,當我們控制手爪抓取物體時,如果舵機帶動手爪轉動角度小于物體寬度時,舵機就會發生堵轉,此時繼續加大扭矩,舵機就會因過載而燒掉。
為了解決這個問題,新款的二自由度舵機手爪(夾持器),參考汽車摩擦式離合器原理和結構,為機械手爪增加了一個“摩擦盤”:在舵機和手爪中間,通過兩個圓盤摩擦連接,傳遞扭力。
只要我們設置合適的摩擦系數,當舵機的遇到的阻力大于兩個圓盤摩擦力的時候,兩個圓盤發生相對運動,避免了舵機電流堵塞發生。當舵機扭力小于摩擦力的時候,舵機帶動夾持器完成物體抓取動作。其原理圖和效果請看下圖:

機械手參數:
搬運負載:≥300g
機器手臂:總長度≥400mm
材料:鋁合金
舵機性能:
(1)4個伺服電機:
輸出力矩:≥10kg?cm
(2)2個伺服電機:
輸出力矩:≥2kg?cm
控制器參數:
(1)與電腦RS232串口通訊,可同時控制不少于30個伺服電機;
(2)雙電源供電;
(3)預留ISP下載口,wi-fi無線控制接口;
電氣參數:
電機工作電壓:4.8-6.0V
控制器工作電壓:6.0-12V
工作電流:1.2-2.5A
搬運負載:300-500g
舵機性能簡介:
1、手臂伺服舵機:
尺 寸:40.4*19.8*36mm
重 量:48g
速 度:0.22sec/60°
輸出力矩:13kg·cm
2、 手爪夾持器舵機:
尺 寸:28x14x29.8mm
重 量:18g
速 度:0.13sec/60°
輸出力矩:2.3kg·cm
機械手臂圖片和視頻:


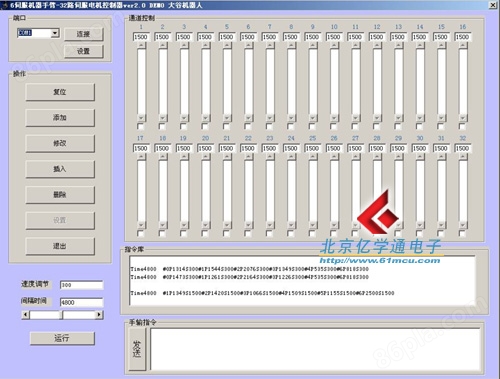
32路伺服電機控制系統界面:
控制器介紹:

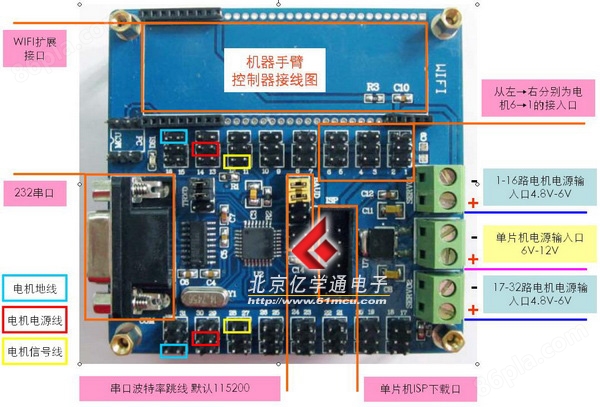
1)如圖所示:從上往下看,電路板正面有三個電源輸入口,中間的為單片機的電源輸入。使用了7805將電壓穩定在5V。因此輸入的電壓在6V到12V之間即可。兩側分別供應16路伺服電電機的。輸入電壓在4。8V~6V之間。
2)伺服電機插針為32排,每排3針。如圖上藍色字體所標志,最外側的針是地,中間是電源,最內側是信號針(接伺服電機上的白色或橙色線)。
3)中間的跳線是設置波特率的,兩個跳線都插上,代表了的值是11,波特率是115.2k。若要設置其他波特綠請參考圖2所示。(上位機軟件默認的設置是115。2K。)
產品配置:
機械手臂 1臺
機械手臂控制器 1臺(AVR單片機為主控制器,提供控制代碼)
串口線 1條
電池盒 1個
光盤 1張
功能擴展:

加裝到6WD車底盤上的“6自由度機械手”
資料下載:
| | 6伺服電機多自由度機械手使用手冊.pdf | 大小:1.19MB | 上傳日期:2011.01.17 |
| | 六自由度機械手上位機軟件.rar | 大小:152KB | 上傳日期:2011.04.25 |
產品配置:
| 配置 |   配件: 配件:  | 售價: |
| 功能描述 | 1、6伺服機器手臂(3個12KG的金屬舵機,一個7.2KG的,兩個2.3KG的伺服電機); | ¥1980 |
















