

一.系統(tǒng)方案概述
1.1 方案設計依據及準則
(1)甲方所提供的被焊工件照片、圖紙及相關要求。
(2) 以產品的工藝分析和工藝流程的合理性為基礎,力求高柔性、高性價比、高可靠性,并且日后可擴 展升級 。
1.2 被焊工件及焊接機器人要求
1.1 工件外形圖如下

工件的焊接要求:
(1) 氣體保護焊接(MAG)。
(2) 焊接牢固,無設備自身原因導致的夾渣、裂紋、咬邊、漏焊等焊接缺陷。
(3) 焊縫均勻平整、無焊瘤等外觀缺陷。
(4) 焊縫尺寸應符合圖紙及技術要求 。
(5) 焊接完畢,工件不得有較大變形量.
1.3 工序及工藝路線的劃分
工序: 產品分四序焊接,
序焊接產品:放在 1 號變位機上面焊接。第二序焊接產品:放在 1 號變位機上面焊接,第三序焊接產品:放在 2 號變位機上面焊接,第四序焊接產品(拖拉機架總成焊接):放在 3 號變位機上面焊接

![]() 人工點固工件→手工搬運工件至焊接變位機→手動夾緊工件-→焊接零部件工件 1→焊接零部件工件 2→焊 接零部件工件 3→焊接拖拉機架總成工件 4→ 焊接工件結束-→機器人復位→ 卸下工件→工件機器人焊接程序 結束→人工補焊工件→工件焊接結束。
人工點固工件→手工搬運工件至焊接變位機→手動夾緊工件-→焊接零部件工件 1→焊接零部件工件 2→焊 接零部件工件 3→焊接拖拉機架總成工件 4→ 焊接工件結束-→機器人復位→ 卸下工件→工件機器人焊接程序 結束→人工補焊工件→工件焊接結束。
工藝: 操作人員按下操作盒上的啟動按鈕,滑臺上的焊接機器人移動到變位機上方,機器人夾持焊槍到達焊縫始
端開始焊接,在焊接過程中焊接機器人可根據焊接速度在滑臺上進行移動(滑臺電機為外部聯動軸,可與焊接 機器人協同),使得工件上的焊縫有利于機器人的焊接作業(yè),焊接結束,機器人復位。
變位機帶動工件適時翻轉,以適應工件的對稱焊接等焊接要求,減少工件焊接變形。 機器人弧焊軟件包:
機器人帶有起始點尋位功能。該功能具備接觸傳感功能,具有自動尋找焊縫起始位置的功能,從而解決工 件初始定位偏差問題。
機器人帶有電弧跟蹤功能。能夠自動補償由于工件的不一致性、焊接變形帶來的偏差,電弧跟蹤需要在擺焊 和 200A 電流以上等特定要求下使用效果更佳。
焊接工藝特點:通過觸碰尋位對于其中特征位置的焊縫集中進行尋位;按照工藝需求,遵循焊接應力變化、
表面要求及焊接可達性要求,依次進行焊接;焊接過程中,部分關鍵尺寸進行必要的二次尋位,以保證起弧位 置準確。并利用變位機大幅反轉的間隙,設置程序,進行清槍剪絲噴硅油的工作。
焊接工藝的分析
(1)工件參數條件
l 工件材料:碳鋼;
l 工件尺寸:3118X1305 X 1000mm;
l 工件圖紙:拖拉機架。
l 焊縫形式:角焊縫 、對接焊接等。
l 工件重量:<1500Kg。
(2)焊接工藝條件
l 采用氣體保護電弧焊接( MAG ).
l 工件不應被油、銹等污染。
l 組對要求:焊縫位置偏差≤5mm,組對間隙≤2mm;
l 保證工件的組對精度符合技術協議要求。
二.機器人焊接系統(tǒng)概述

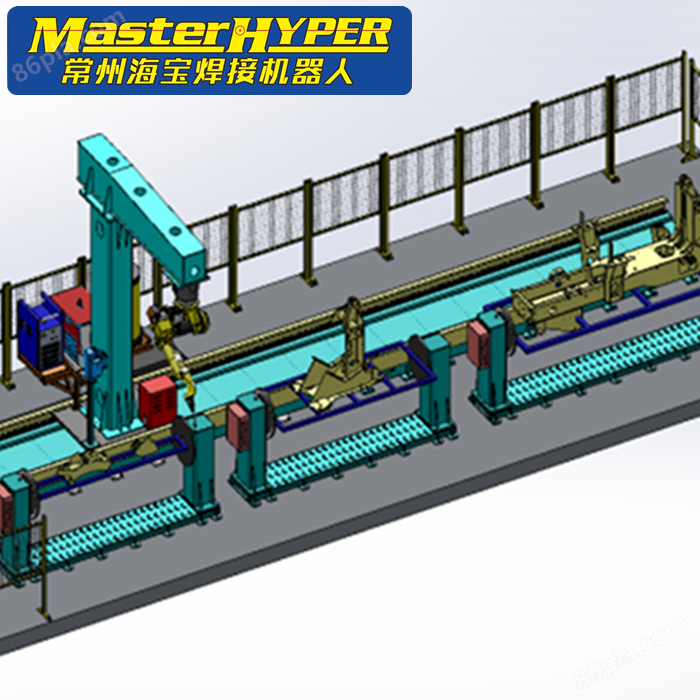
2.1 機器人焊接系統(tǒng)概述
本機器人焊接系統(tǒng)可以 24 小時連續(xù)作業(yè),跟人工作業(yè)相比,其效率、質量、穩(wěn)定性等有很大提高。 該系統(tǒng)配置主要由 1 臺弧焊機器人、1 套美國林肯焊接電源、3 套單軸頭尾架焊接變位機、1 套機器人水冷
![]()
焊槍系統(tǒng)、1 套機器人地軌 C 型梁滑臺系統(tǒng)、1 套清槍剪絲裝置、4 套工裝夾具、1 套集成控制系統(tǒng)等組成。 整套焊接機器人系統(tǒng)特點: 1、該機器人焊接系統(tǒng)帶有起始點尋位、電弧跟蹤、多層多道等弧焊軟件包的功能,可以有效解決工件組対誤差問題。工件采用分四序焊接的方式,可以顯著提高工件的可焊率,減少人工的補焊量。
2.2 機器人焊接系統(tǒng)集成設備配置表
表 2-1 機器人焊接系統(tǒng)集成設備配置表
序號 | 名 稱 | 規(guī) 格 | 品 牌 | 數量 | 單位 | 備注 | |||
1 | 焊接機器人(包含本 體、控制柜、示教器 及集成線纜) | M-10iA/8L | FANUC(發(fā)那 科) | 1 | 套 | 臂 展 2028mm,負載 8Kg,內置焊槍 | |||
2 | 弧焊軟件包(起始點 尋位,電弧跟蹤功能、 多層多道) | 1 | FANUC/林肯 | 1 | 套 | ||||
3 | 焊接電源 | 455M STT | 林肯(美國) | 1 | 臺 | 額定電流 500A | |||
4 | 機器人焊槍(液冷) | 82W | TBI | 1 | 套 | 帶夾絲功能 | |||
5 | 循環(huán)水箱 | MasterHyper | 1 | 套 | |||||
6 | 防碰撞傳感器 | TBI | 1 | 套 | |||||
7 | 清槍器 | MasterHyper | MasterHyper | 1 | 套 | ||||
8 | 機器人地軌 C 型梁滑 臺系統(tǒng) | MasterHyper /FANUC | 1 | 套 | 外部一軸,有效行程 10 米 | ||||
9 | 焊接變位機一 | 單軸頭尾架 | MasterHyper | 2 | 套 | 外部一軸, 負載 500Kg | |||
10 | 焊接變位機二 | 單軸頭尾架 | MasterHyper | 1 | 套 | 外部一軸, 負載 2000Kg | |||
11 | 工裝夾具 | 手動夾具 | MasterHyper | 4 | 套 | ||||
12 | 系統(tǒng)集成及控制 | MasterHyper | 1 | 套 | |||||
13 | 安全防護 | MasterHyper | 1 | 套 | |||||
14 | 安裝調試及培訓 | MasterHyper | 1 | 期 | |||||
15 | 配件 | MasterHyper | 1 | 套 | 詳見清單 | ||||
16 | 運輸及保險 | MasterHyper | 1 | 次 | |||||
2.3 設備演示圖

















