N-SVR-1 Robot和N-SVS Robot 是由  設計開發的系列視覺機器人平臺。主要用于大專院校、科研院所有關視頻圖像處理方面的教學、科研和應用。現在億學通在大陸進行全面銷售。歡迎新老客戶咨詢、采購。
設計開發的系列視覺機器人平臺。主要用于大專院校、科研院所有關視頻圖像處理方面的教學、科研和應用。現在億學通在大陸進行全面銷售。歡迎新老客戶咨詢、采購。
1.描述Description:
SVS是一款多功能履帶式機器人,基于開源軟件平臺,可通過WIFI進行無線操控,并可實時采集現場視頻,同時還支持自主運行以及集群管理模式。它使用的是雙目攝像頭,可以實現立體成像。其設計可廣泛應用于各個相關行業的科研、教學以及新產品原型開發等領域當中。SVS是SRV-1的擴展產品,更多詳細信息可參閱SRV-1機器人。
2、產品參數:
? 遵循GPL開放全部軟件源碼及硬件設計圖
? 機器人具有執行自主運行程序的能力
? 有廣泛的第三方軟件支持
? 可以通過軟件控制臺或網絡瀏覽器實現對機器人的遠程遙控
? 主機軟件內建網絡服務器并支持視頻存檔
? 機器人可以解釋執行儲存在FLASH中或內存中的C程序
? 無線遙控范圍:室內100米室外1000米(視野空曠的地方)
? 機器人可以通過終端控制臺進行快捷的控制與調試
? 實現上下或左右的的視覺跟蹤,支持立體成像
? 支持GNU/Linux操作系統也同時支持直接在DSP上通過GNU bfin-elf-工具鏈開發bare-metal應用
硬件參數:
? 處理器:500MHz的ADI Blackfin BF537, 32MB SDRAM, 4MB SPI Flash, JTAG
? 攝像頭:Omnivision OV7725, 30萬像素(160x128到640x480 分辨率)
? 串口無線通訊模塊:Lantronix Matchport 802.11b/g WiFi
? 云臺控制裝置:由舵機和固定裝置構成(可選)
? 傳感器:2個激光點
? 驅動:雙直流齒輪電動機驅動雙履帶
? 速度:20-40厘米每秒
? 框架:鋁制機械
? 規格:120mm長 x 100mm寬 x 150mm高
? 重量:約500克
? 電源:7.2V 2Ah鋰電池 使用時間大約4小時
? 充電器:100-240交流電50/60Hz
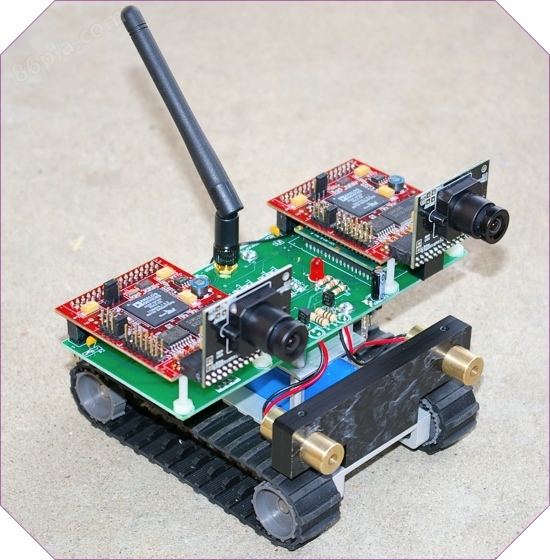
3、產品圖片:
SVS立體攝像頭模塊:包含兩塊BF537核心控制板 
4.產品視頻:
N-SRV-1視覺機器人 視頻追蹤功能演示(1)
N-SRV-1視覺機器人 視頻追蹤功能演示(2)
N-SRV-1視覺機器人 手機客戶端軟件演示
N-SRV-1視覺機器人 集群功能演示
N-SRV-1視覺機器人 越野越障能力演示
5.產品資料:
參考資料,請在網站資料下載欄目打開:/?article-173.html
Stereo Vision System Specifications
- Two SRV-1 Blackfin camera modules separated by 10.75 cm (4.25"). Each camera module includes:
- 500MHz Analog Devices Blackfin BF537 Processor (1000 integer MIPS), 32MB SDRAM, 4MB SPI Flash, JTAG, external 32-pin i/o header w/ 2 UARTS, 4 timers (PWM/PPM), SPI, I2C, 16 GPIO
- Omnivision OV9655 1.3 megapixel sensor with AA format header and interchangeable lens - M12 P0.5 format - 3.6mm f2.0 (90-deg FOV) or optional 2.2mm f2.5 (120-deg FOV)
- Processor-to-processor communications via SPI bus (64MHz)
- Lantronix Matchport WLAN 802.11g radio w/onboard 3dB dipole antenna for Wifi communications
- On-board 3.3V high efficiency switching regulator (Recom R-783.3-1.0) for battery input (4.75 - 18.0 VDC)
- Headers for 8 servos (5V supply provided)
- Dual H-bridge motor driver (Fairchild FAN8200) with 1000mA drive current per motor
- Two switching transistor drivers with 100mA drive current for lights and laser pointers
- Low battery detect circuit
- Headers for 8 servos (5V regulator provided)
- Extended pin headers for full access to S-32 expansion bus of both processors
- Board dimensions - 60 mm x 150 mm (2.5" x 6.0"), 140g (5 oz)
- 1" x 2" mounting hole pattern for compatibility with SRV-1 robot base (dual and quad motor versions)
- Total power draw - 300mA @ 7.4V (approx 2 watts)
- RoHS compliant
Default Firmware- GPL Open Source - download from /blackfin/#blackfin3
- Full-speed frame capture direct to SDRAM at 1280x1024, 640x480, 320x240 or 160x120 pixel resolutions
- JPEG (Motion JPEG) compression
- Basic image processing - histogram, pixel sampling, mean, frame difference, blob, scan, count, find
- Stereo correspondence and image rectification functions (in development)
- Motor control for PWM (H-bridge) and PPM (servo) interfaces
- Built-in interpreters for Small C or Lisp languages for autonomous operation
- Real-Time-Clock (milliseconds since reset), internal timer resolution to 10 nanoseconds
- Direct control of I2C and SPI devices
- In-Application-Programming (IAP) of flash memory
- XMODEM protocol for reliable file transfer
- Direct support for up to 4 Maxbotics ultrasound rangers per camera module
- Compiled with GNU Blackfin Toolchain (bfin-elf-gcc) - download from/blackfin/#blackfin4
- Command Protocol Definition - SRV_protocol
Schematics and Drawings- Stereo Vision Module EAGLE 5 Files: bfin-stereo-v2.sch bfin-stereo-v2.brd
- SRV-1 Blackfin Camera Schematic (204kB)
- OV9655 Camera Module Schematic (136kB)
- S-32 expansion bus pin assignments for each SRV-1 Blackfin camera module
Host Software Support- SRV1Test.java - new test console source code
- compile with "javac SRV1Test.java" launch with "java SRV1Test"
- SRV1Test.jar - precompiled class files - launch with "java -cp SRV1Test.jar SRV1Test"
- command line options:
- -remote_addr (SRV-1 IP address - default is 169.254.0.10)
- -remote_port (SRV-1 port - default is 10001)
- -local_port (host computer port - default is 10001)
- -protocol (TCP or UDP - default is TCP)
- -archive (capture all frames to named directory)
- sample script for stereo feeds -
java SRV1Test -remote_addr 192.168.0.15 -remote_port 10001 -local_port 10001 &
java SRV1Test -remote_addr 192.168.0.15 -remote_port 10002 -local_port 10002 & - SRV1Test is described here -
/cgi-bin/robot_journal2.cgi/2008/06/12#166
/cgi-bin/robot_journal2.cgi/2008/06/12#167
- stereo.c - C-based cross-platform (Win, OS/X, Linux) console employing SDL libraries
- anaglyph stereo viewing
- archive to PPM, use scripts to encode to AVI, MPEG, e.g.
- for f in *ppm ; do convert -quality 100 $f `basename $f ppm`jpg ; done
- mencoder "mf://*.jpg" -mf fps=10 -o test.avi -ovc lavc -lavcopts vcodec=mjpeg:vbitrate=1000
- simple robot control with keypad arrows + space bar (halt)
- ability to image map commands with mouse clicks on the display window
- forum discussion - /cgi-bin/yabb2/YaBB.pl?num=1222462001
- SDL library downloads
- /download-1.2.php
- /projects/SDL_image/
- /projects/SDL_net/
- gcc command line
- Windows mingw32: mingw32-gcc -O2 -o stereo.exe stereo.c -I/mingw/include/sdl -L/mingw/lib -lmingw32 -lSDLmain -lSDL -lSDL_image -lSDL_net
- OS/X gcc: gcc -g -O2 -I/usr/local/include/SDL -D_GNU_SOURCE=1 -D_THREAD_SAFE -Wl,-framework -Wl,Cocoa -Wl,-bind_at_load -L/usr/local/lib -lSDLmain -lSDL -lSDL_net -lSDL_image -o stereo stereo.c
- Linux gcc: gcc -g -O2 -I/usr/include/SDL -L/usr/lib -lSDLmain -lSDL -lSDL_net -lSDL_image -o stereo stereo.c
- Tips for setting up SDL in Windows - http://lazyfoo.net/SDL_tutorials/lesson01/windows/index.php
- AForge.NET - open source C# framework with SRV-1 and SVS support
- SVS code samples - /framework/samples/robotics.html#srv1
- Getting started - /articles/svs_start/
- DelphiSRV
- Windows-based console for SVS by Andrew Hutchison
- motor/servo control, image processing, anaglyph viewing, customized buttons
- download from /stereo/DelphiSRV.zip - last updated 26 May 2009
- software overview - click here
- Sentience Stereo Vision Software Version 0.2
- description: /p/sentience/wiki/SurveyorSVS
- download: /files/surveyor_svs_v0_2_0.zip
- blog posts -
- /2008/08/simple-stereo-correspondence.html
- /2008/08/visual-disparity.html
- /2008/08/image-rectification-example.html
- /2008/08/surveyor-project-calibration.html
- /2008/07/testing-surveyor-stereo-camera.html
- RoboRealm
- RoboRealm Stereo Viewing Module
- Click here for configuration details
- stereo disparity mapping for SVS (coming soon)


















