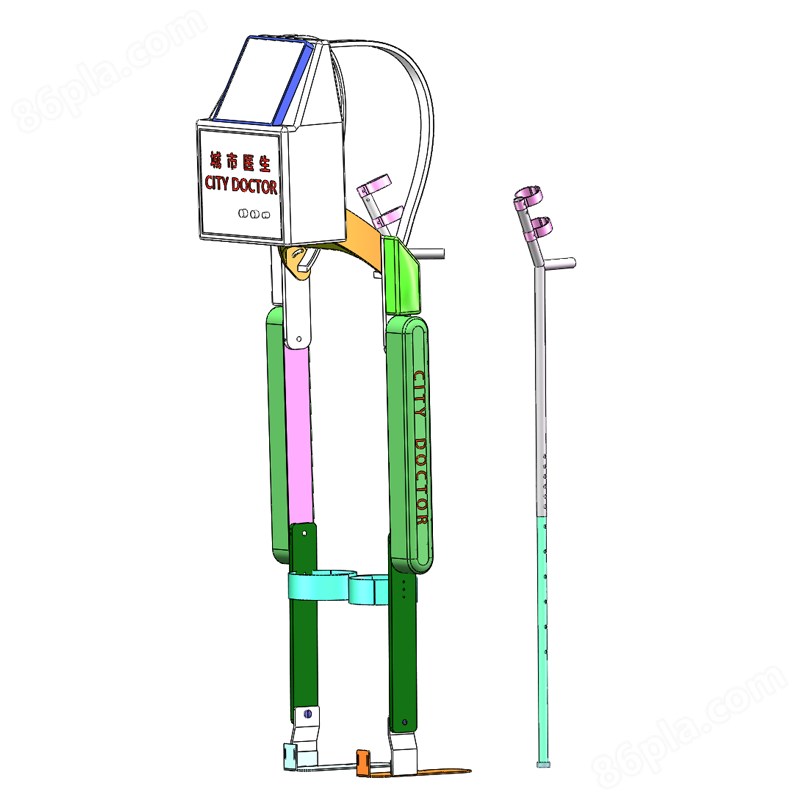


智能外骨骼助力機(jī)器人YBF2S6是一款用于輔助步態(tài)訓(xùn)練的新型可穿戴式下肢外骨骼助力機(jī)器人。
機(jī)器人擁有主動被動訓(xùn)練模式,通過對髖、膝、踝關(guān)節(jié)提供助力完成行走訓(xùn)練,可以大幅助力和節(jié)省人力。
YBF2S6外骨骼機(jī)器人是款采用了柔性驅(qū)動器作為動力輸出的外骨骼機(jī)器人。
YBF2S6擁有帶動力的4關(guān)節(jié)(雙側(cè)髖、膝),和髖部踝部旋轉(zhuǎn)輔助關(guān)節(jié),可實現(xiàn)自然步態(tài),
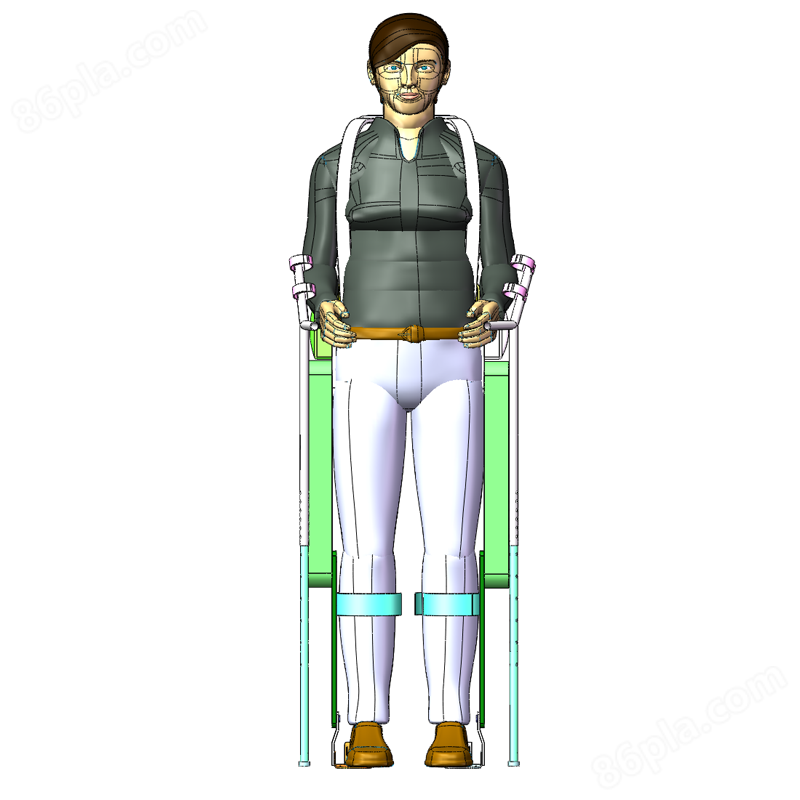
適合身高145- 190cm之間,體重小于150kg的人體使用。并且其外骨骼尺寸可調(diào),
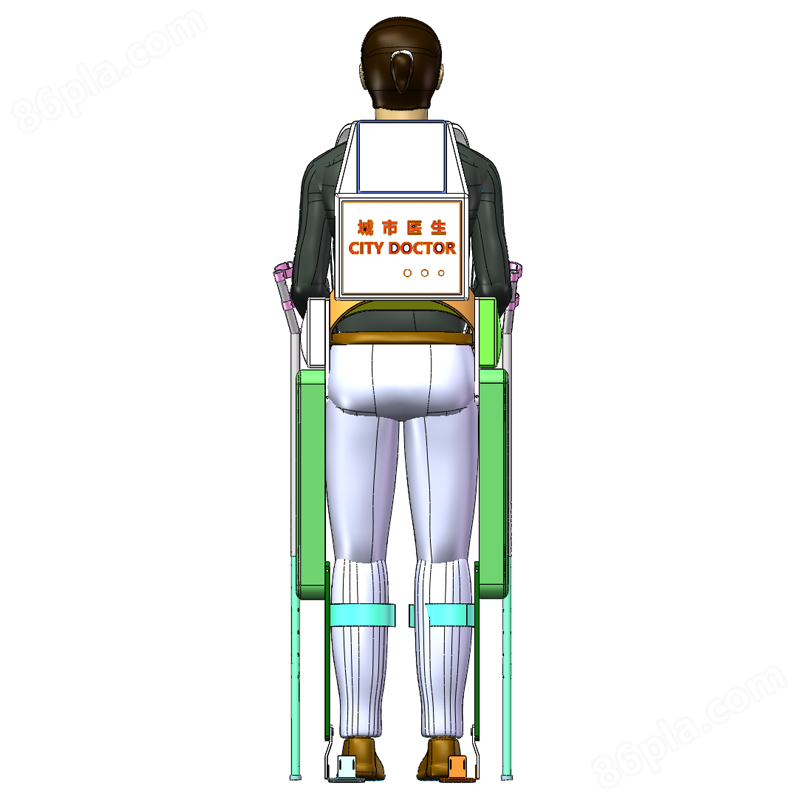
配備步態(tài)監(jiān)測評估系統(tǒng),可通過觸摸屏實時監(jiān)察運動數(shù)據(jù)。
YBF2S6機(jī)器人上還裝有陀螺儀等多種*高科技傳感器,可以實時檢測人體的運動狀態(tài)。
并且可以主動式或被動式模式,例如運動的快慢、啟動與停止、左腿還是右腿等等,這些信息都可手動保存采集記錄并用于控制機(jī)器人。

機(jī)器人外形小巧、體積小、重量輕,能夠精準(zhǔn)、舒適的完成各項動作。
手持式觸摸控制系統(tǒng),采用無線數(shù)字通訊方式控制,大幅簡化配線的復(fù)雜度也提高了抗噪聲干擾的能力。
可透過人機(jī)接口與系統(tǒng)二次開發(fā)功能,讓功能更符合客戶需求、應(yīng)用更具彈性
The robot is small in shape, small in size and light in weight, and can perform various actions accurately and comfortably.
The handheld touch control system adopts wireless digital communication mode to control, greatly simplifies the complexity
of wiring and improves the ability of anti-noise interference. Through the man-machine interface and system secondary development functions, so that the function more in line with customer needs, applications more flexible