


移動機器人要想實現安全避障*步便是對環境進行感知。就繞障來說,移動機器人需要通過傳感器實時獲取自身周圍障礙物信息,包括尺寸、形狀和位置等信息。在避障方式上,各家的避障傳感器種類繁多,但無外乎單點紅外傳感器,單線激光雷達、超聲波傳感器、碰撞條以及視覺傳感器。
藍芯科技是以計算機視覺為核心技術,利用人工智能技術結合深度視覺感知傳感器讓機器“慧”做事。公司出品的移動機器人采用自研的Eagle系列RGBD相機結合多種傳感器進行自主避障,優勢在于可以根據不同的應用需求定制化避障傳感器性能參數。
市面上絕大部分的移動機器人采用機械式碰撞條作為防撞措施,這種暴力性機械式的避障通常應該作為后的防撞措施,采用超聲波進行避障的也不在少數,這種技術經常會存在誤判;技術稍*一些的采用激光雷達進行避障,但是激光雷達的局限性在于,它只能掃描某一平面內的障礙物,至于那些低于或者高于掃描面的障礙物則表現出無能為力,尤其是低矮障礙物和懸空障礙物等等情況;技術極為*的是采用視覺進行立體避障,但是絕大多數視覺避障都是針對近距離障礙物進行識別,所以目前極為完善的是視覺+激光雷達的方案進行避障。
藍芯科技RGBD相機為移動機器人而生,解決了3D視覺傳感器在工業應用中的諸多技術難題,包括高環境光干擾,金屬反光,反射率影響,運動模糊,多機干擾等等。為應用在移動機器人上,相機曾在在振動臺(100Hz震動)、高低溫循環箱(-10℃-80℃)內連續運轉超過2個月。常規室內情況下,裝有Eagle傳感器的移動機器人可以避開地面以上3cm障礙物或低于地平面3cm的凹坑,面對窗邊陽光直射場景、金屬拉絲反光、低至5%反射率等情況依然有較好的避障性能。
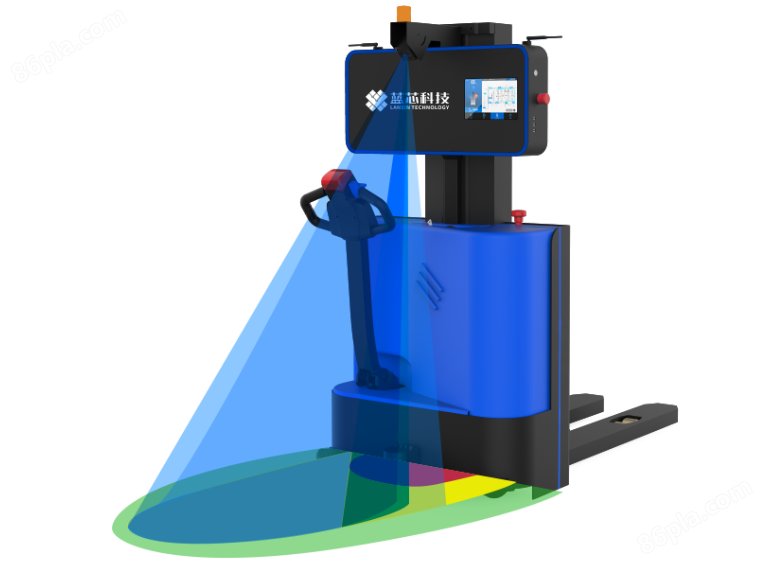
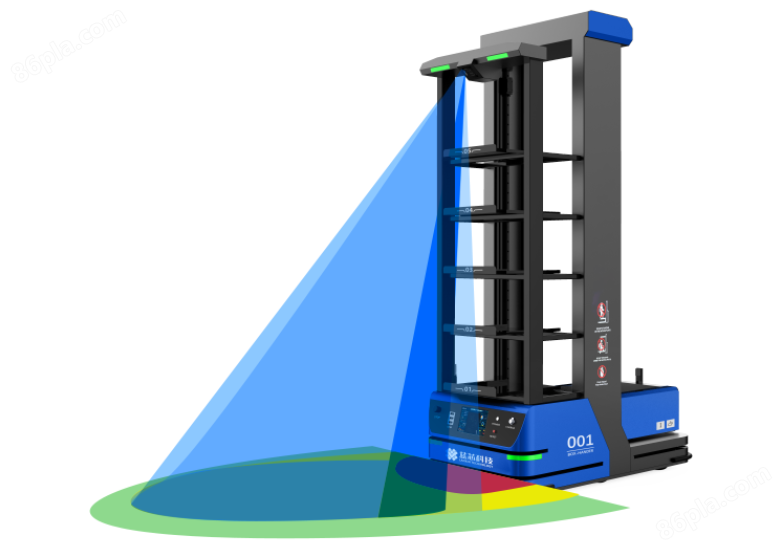
叉車和料箱車避障:
其采用Eagle系列LXPS-Eagle-I320-U/LXPS-Eagle-I320-E傳感器進行避障,傳感器詳細規格參數如下:
測距范圍: 0.5-6m(遠測距12m)
測距精度: 1% @ 2m 70%反射率
視場角: 72°X 55°;
分辨率: 320*240
幀率: 20fps
數據接口: USB3.0/Ethernet
相機尺寸: 43mm×78mm×38mm
運行環境: -10℃-70℃
陽光抑制: 50klux
















