注塑機 擠出機 造粒機 吹膜機 吹塑機 吹瓶機 成型機 吸塑機 滾塑機 管材生產(chǎn)線 板材生產(chǎn)線 型材生產(chǎn)線 片材生產(chǎn)線 發(fā)泡設備 塑料壓延機
安徽合動智能科技有限公司

安徽合動智能科技有限公司
| 參 考 價 | 面議 |
產(chǎn)品型號
品 牌
廠商性質(zhì)其他
所 在 地合肥市
塑料機械網(wǎng)采購部電話:0571-88918531 QQ:2568841715
QQ:2568841715
聯(lián)系方式:查看聯(lián)系方式
更新時間:2023-08-19 12:51:04瀏覽次數(shù):507次
聯(lián)系我時,請告知來自 塑料機械網(wǎng)暫無信息 |
一、概述 ACS506伺服驅(qū)動器是一款全新直流供電的高性能、低壓、交流數(shù)字伺服驅(qū)動器,采用TITMS320F28069DSP芯片作為主處理器,能實現(xiàn)直流無刷電機、輪轂伺服電機、交流伺服電機、永磁同步電機的電流、速度、位置精確控制
一、 概述
ACS506伺服驅(qū)動器是一款全新直流供電的高性能、低壓、交流數(shù)字伺服驅(qū)動器,采用TI TMS320F28069 DSP芯片作為主處理器,能實現(xiàn)直流無刷電機、輪轂伺服電機、交流伺服電機、永磁同步電機的電流、速度、位置精確控制。
該驅(qū)動器具有高動態(tài)性能,高達30A峰值電流,平滑的低速性能,強的抗力,并具備欠壓、過壓、過載、過流、堵轉(zhuǎn)、Hall或編碼器異常報警等功能,伺服性能達到國內(nèi)外伺服驅(qū)動器的水平。
驅(qū)動器體積小巧,安裝和調(diào)試簡單方便。通過驅(qū)動器調(diào)試軟件,用戶可以輕松匹配電機和伺服驅(qū)動器的基本參數(shù),更改電機控制模式、比例增益等,實現(xiàn)對電機的精確控制。
驅(qū)動器為用戶提供一種高性價比、功能可以定制開發(fā)的伺服驅(qū)動、控制解決方案,在確保穩(wěn)定可靠的前提下,追求最貼近應用的性能。
二 、技術(shù)參數(shù)
| 型號參數(shù) | ACS506 | |
| 電源 | 動力電源 | 24VDC~60VDC(典型48V) |
| 邏輯電源 | 從動力電源轉(zhuǎn)換 | |
| 電流 | 連續(xù)輸出電流(Arms) | 15A |
| 峰值電流(PEAK) | 30A | |
| 反饋信號 | 可支持增量式光電編碼器,BISS協(xié)議的多圈值編碼器 | |
| 能耗制動 | 需要外接制動電阻(根據(jù)實際情況而定) | |
| 能耗制動電壓吸收點 | 可設置 | |
| 過壓報警 | 可設置 | |
| 欠壓報警 | 20V±2V | |
| 冷卻方式 | 風冷 | |
| 重量(KG) | 0.2KG | |
| 通 用 功 能 | 輸入規(guī)格 | 3路輸入,低電平有效 |
| 輸入功能 | 驅(qū)動器使能、脈沖輸入,方向輸入 | |
| 輸出規(guī)格 | 1路數(shù)字輸出 | |
| 輸出功能 | 固定為驅(qū)動器故障輸出 | |
| 編碼器信號輸出功能 | 可輸出A、B、Z信號,可用于主從跟隨和反饋編碼器位置信息 | |
| RS232 | 支持115200波特率,使用自定義協(xié)議與控制器通訊 | |
| 保護功能 | 超速、過流、過壓、欠壓、過載、超差、編碼器故障、溫 度過高、內(nèi)部芯片故障、模塊故障 | |
| CAN BUS | 支持1M波特率,采用自定義的協(xié)議進行控制,簡單便攜,也可以使用CANopen協(xié)議與控制器通訊(貨期2-3個月) | |
| EtherCAT | 支持CoE(CiA402協(xié)議)(貨期2-3個月) | |
| 使 | 工作溫度 | 0-40℃ |
| 保存溫度 | -10 - 70 ℃ | |
| 濕度 | 40%~80%無結(jié)露 | |
| 保護等級 | IP20 | |
| 安裝場所 | 無粉塵干燥 | |
| 安裝方式 | 垂直安裝 | |
| 高度 | 1000m以下 | |
| 大氣壓 | 86kpa - 106kpa | |
三、電氣連接
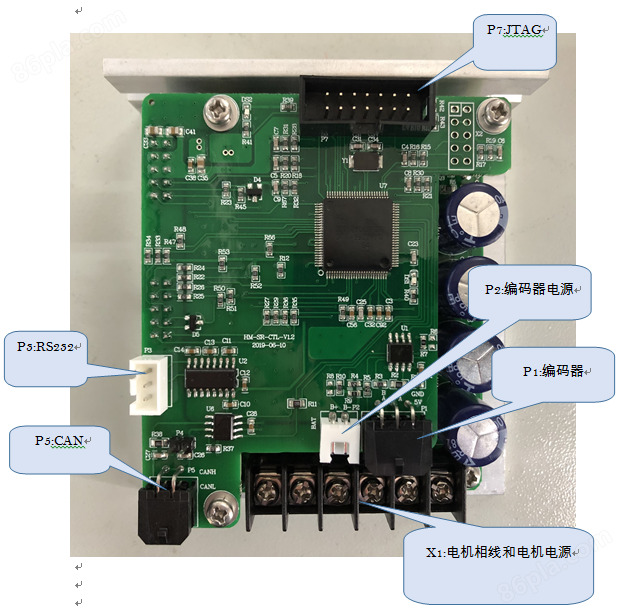
四、接口說明
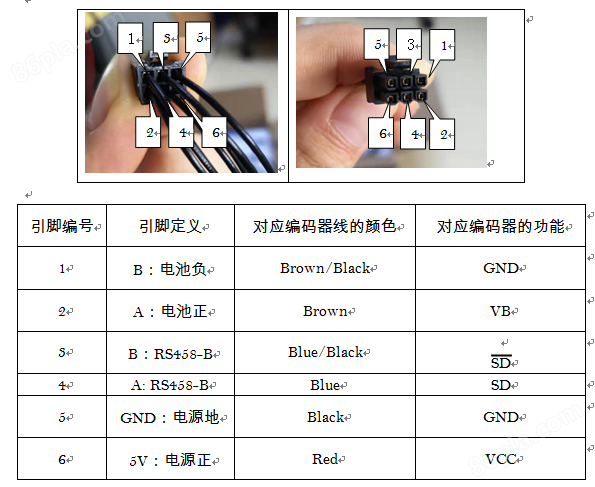
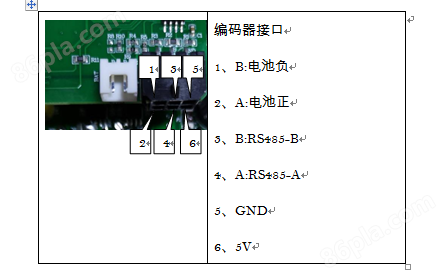
(一)編碼器接線管腳定義
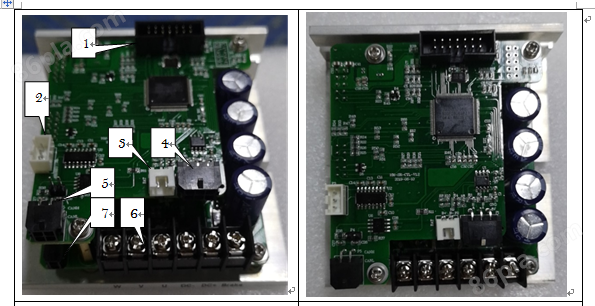
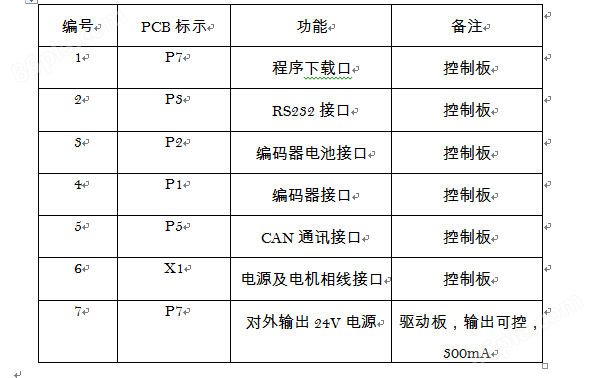
(三)接線端子定義介紹
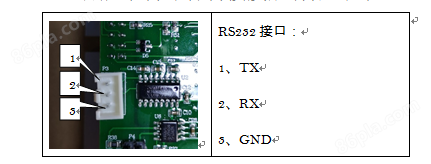
3.1 控制板P3
3.2 控制板P2

3.3 控制板P1
3.4 控制板P5
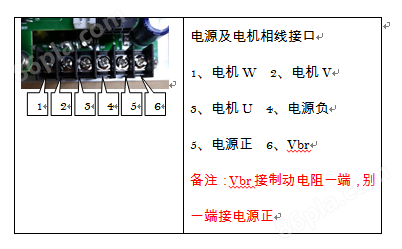
3.5 功率板X1
3.6 功率板P7
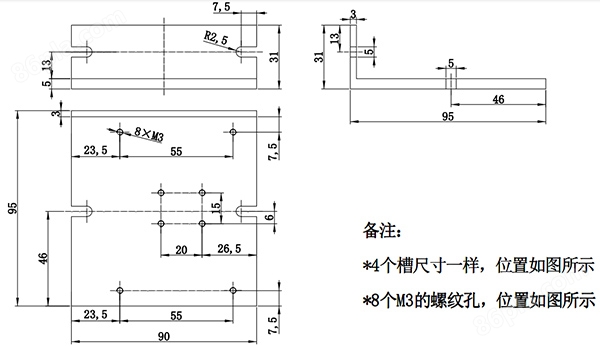
五、安裝尺寸
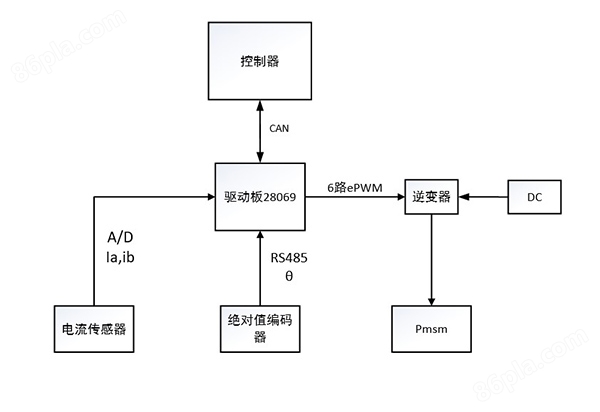
六、系統(tǒng)框架圖
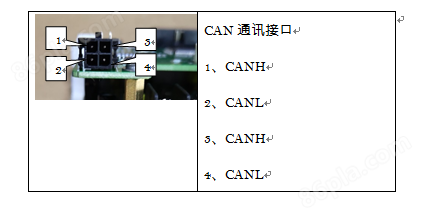
七、CAN通訊
(一)連接USB_CAN
將USB_CAN接線的USB端連接到計算機的USB 接口,CANH和CANL連接到驅(qū)動器的CAN通訊接口。
(二)控制程序的使用
1.打開CAN通訊軟件“USB_CAN",點擊<模式選擇>選擇正常模式,點擊<波特率>選擇1M,再點擊<設置>。
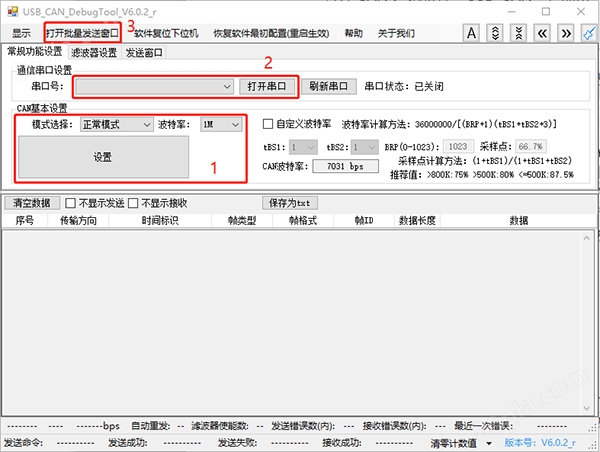
2.點擊<串口號>選擇正確的串口并點擊<打開串口>。
3.點擊<打開批量發(fā)送窗口>彈出控制界面。
下表是對數(shù)據(jù)欄的具體說明
| 位 | 值 | 說明 |
| 字節(jié) | 11H、12H | 訪問的起始地址值 |
| 第二字節(jié) | 00H | 空 |
| 第三字節(jié) | 00H——1FH | 相應地址下的索引 |
| 第四字節(jié) | 00H、40H | 00為寫操作,40為讀操作 |
| 后四個字節(jié) | 根據(jù)實際物理量設定 | 寫入的參數(shù)值數(shù)據(jù) |
(三)CAN ID設置
在地址12H的索引01H中,發(fā)送1-127的數(shù)據(jù)可將CAN地址改為0x300+(1-127)的地址。
CAN ID設置指令
12 00 01 00 xx 00 00 00
(四)使能和失能
驅(qū)動器與電機連接上電后,需要發(fā)送控制使能命令,電機進入位置環(huán)模式。三環(huán)工作模式需要在失能狀態(tài)下切換。
控制使能命令
11 00 09 00 00 00 00 00
控制失能命令
11 00 0A 00 00 00 00 00
(五)故障代碼
驅(qū)動電機出現(xiàn)故障時,驅(qū)動的故障指示燈會閃爍并且報故障代碼。故障代碼會存儲起來,掉電不丟失。若有故障重新上電,需要清除故障代碼。
| 變量:故障代碼 | Error_I |
|
| 0 |
| 1:相電流瞬時值大于 35 A | 0x0001 |
| 2:編碼器故障 | 0x0002 |
| 4:欠壓,低于 24V | 0x0004 |
| 8:過壓,高于 55V | 0x0008 |
| 16:位置誤差超過設定值 | 0x0010 |
| 32:缺相或是電流沖擊過大或是角度異常,電流環(huán)參數(shù)PI 不匹配也會造成該故障 | 0x0020 |
| 64:相線接錯、堵轉(zhuǎn)保護 | 0x0040 |
| 128:母線電壓高于50V | 0x0080 |
| 256:編碼器電池掉電 | 0x0100 |
讀取故障代碼
0000030X 12 00 11 40 00 00 00 00
故障代碼清除
(七)控制環(huán)配置說明
驅(qū)動器使用最多三個嵌套的控制循環(huán):電流、速度和位置,以三種相關的工作模式控制電機。在位置模式下,使用所有三個回路。在典型系統(tǒng)中,位置環(huán)驅(qū)動嵌套的速度環(huán),速度環(huán)驅(qū)動嵌套的電流環(huán)。
在
讀CAN ID指令
0000030X 12 00 01 40 00 00 00 00
變量:can接受幀數(shù)據(jù)CAN_DataRx[4]
起始地址(ADR)0
索引 (Index) 1
數(shù)據(jù)低16位2
數(shù)據(jù)高16位3
1. 電流環(huán)配置
(1) 運行模式在地址12H下,索引02H的位置,電流環(huán)模式為1,<設置模式>選項中發(fā)送數(shù)據(jù)“12 00 02 00 01 00 00 00"使驅(qū)動器運行為電流環(huán)模式。
地址索引設置值說明
12H02H01H電流環(huán)
(2) 電流設定在地址11H下,索引00H的位置,單位為0.01A。
電流大小設置 0000030X 11 00 00 00 xx xx 00 00
電流環(huán)KP設置 0000030X 12 00 07 00 xx xx 00 00
電流環(huán)KI設置 0000030X 12 00 08 00 xx xx 00 00
例如運行電流環(huán)為1A,<電流設置>選項中發(fā)送數(shù)據(jù)“11 00 00 00 64 00 00 00"。
地址索引設置值單位范圍說明
11H00H64H0.01A±3000電流大小
12H07H3500電流環(huán)KP
12H08H25電流環(huán)KI
(3) 讀取電流相關參數(shù)的地址在11H下,單位為0.01A。例如讀取實際電流Iq,<讀電流設置>選項中發(fā)送數(shù)據(jù)“11 00 10 40 00 00 00 00"。
地址索引單位說明
11H10H0.01A實際電流Iq
11H13H0.01A實際電流Id
11H18HU相電流
11H19HV相電流
2. 速度環(huán)配置
(1) 運行模式在地址12H下,索引02H的位置,速度環(huán)模式為2,<設置模式>選項中發(fā)送數(shù)據(jù)“12 00 02 00 02 00 00 00"使驅(qū)動器運行為速度環(huán)模式。
地址索引設置值說明
12H02H02H速度環(huán)
(2) 速度設定在地址11H下,索引01H的位置,單位為0.1RPM。
速度大小設置 0000030X 11 00 01 00 xx xx 00 00
速度環(huán)KP設置 0000030X 12 00 0A 00 xx xx 00 00
速度環(huán)KI設置 0000030X 12 00 0B 00 xx xx 00 00
例如運行速度環(huán)為10RPM,<速度設置>選項中發(fā)送數(shù)據(jù)“11 00 01 00 64 00 00 00"。
地址索引設置值單位范圍說明
11H01H64H0.1RPM±3000電機轉(zhuǎn)速
12H0AH3000速度環(huán)KP
12H0BH15速度環(huán)KI
(3) 讀取速度相關參數(shù)的地址在11H下,單位為0.1RPM。例如讀取實際速度大小,<讀電流>選項中發(fā)送數(shù)據(jù)“11 00 11 40 00 00 00 00"。
地址索引單位說明
11H11H0.1RPM實際速度
11H14H0.1RPM速度偏差
3. 位置環(huán)配置
(1) 運行模式在地址12H下,索引02H的位置,位置環(huán)模式為3,<設置模式>選項中發(fā)送數(shù)據(jù)“12 00 02 00 03 00 00 00"使驅(qū)動器運行為位置環(huán)模式。
地址索引設置值說明
12H02H03H位置環(huán)
(2) 位置設定的起始地址為11H,索引02H的位置。
位置環(huán)模式設置 0000030X 12 00 03 00 0x 00 00 00
位置大小設置 0000030X 11 00 02 00 xx xx xx xx
位置環(huán)KP設置 0000030X 12 00 0D 00 xx xx 00 00
例如運行位置為100,<位置設置>選項中發(fā)送數(shù)據(jù)“11 00 02 00 64 00 00 00"。
地址索引設置值單位范圍說明
12H03H0-10:梯形加減速;1:五次多項式
12H04H10000.1RPM±3000位置環(huán)速度
12H05H2000加速度
12H0DH2000位置環(huán)KP
11H02H脈沖位置設定ptp
11H03H位置設定DF
11H04H10000運動時間DF
(3) 讀取位置相關參數(shù)的地址在11H下。例如讀取實際位置大小,<讀位置>選項中發(fā)送數(shù)據(jù)“11 00 12 40 00 00 00 00"。
地址索引說明
11H12H實際位置
11H15H位置偏差
八、 附表-寄存器表說明
|
| 命令:0011H,以下索引對應實時變量,掉電丟失, |
|
|
| ||||
| 索引: | 索引: | 讀/寫 | 指令功能 | 默認值 | 單位 | 范圍 | 變量:can | CAN_DataRx[4]: |
| 0 | 0 | 讀/寫 | 電流設定(電流模式) | 0 | 0.01A | ±1500 | 命令(ADR) | 0 |
| 1 | 1 | 讀/寫 | 速度設定(速度模式) | 0 | 0.1RPM | ±2400 | 索引 (Index) | 1 |
| 2 | 2 | 讀/寫 | 位置設定ptp | 0 | 脈沖 | ±31位 | 數(shù)據(jù)低16位 | 2 |
| 3 | 3 | 讀/寫 | 位置設定DF | 0 | 脈沖 |
| 數(shù)據(jù)高16位 | 3 |
| 4 | 4 | 讀/寫 | 運動時間DF | 4000 |
|
| 案例: 如上文所示 | |
| 5 | 5 | 讀/寫 | 五次多項式時間系數(shù) | 1000 |
|
| ||
| 6 | 6 | 讀/寫 | 電流環(huán)與速度環(huán)使能 | 0 | 使能:5 |
| ||
| 7 | 7 | 讀/寫 | 電機急停 | 0 |
|
| ||
| 8 | 8 | 讀/寫 | 一般故障代碼清除 | 0 | 0:保留 |
|
|
|
| 9 | 9 | 讀/寫 | 控制使能命令 | 0 | 使能 |
|
|
|
| A | 10 | 讀/寫 | 控制失能命令 | 0 | 失能 |
|
|
|
| B | 11 | 讀/寫 | Can通訊上傳時間設置 | 1000 | *0.16ms |
|
|
|
| C | 12 | 讀/寫 | 編碼器丟掉故障清除 | 0 | 0:保留 |
|
|
|
| D | 13 | 讀/寫 |
| 0 |
|
|
|
|
| E | 14 | 讀/寫 |
| 0 | 0 |
| 變量:故障代碼 | Error_I |
| F | 15 | 讀/寫 | 24V輸出 | 0 |
|
|
| 0 |
| 10 | 16 | 讀 | 電流Iq實際 | 0 | 0.01A |
| 1:相電流瞬時值大于 35 A | 0x0001 |
| 11 | 17 | 讀 | 速度實際 | 0 | 0.1RPM |
| 2:編碼器故障 | 0x0002 |
| 12 | 18 | 讀 | 位置實際 | 0 | 脈沖 |
| 4:欠壓,低于 24V | 0x0004 |
| 13 | 19 | 讀 | 電流Id實際 | 0 | 0.01A |
| 8:過壓,高于 55V | 0x0008 |
| 14 | 20 | 讀 | 速度偏差 | 0 | 0.1RPM |
| 16:位置誤差超過設定值 | 0x0010 |
| 15 | 21 | 讀 | 位置偏差 | 0 | 脈沖 |
| 32:缺相或是電流沖擊過大或是角度異常,電流環(huán)參數(shù)PI 不匹配也會造成該故障 | 0x0020 |
| 16 | 22 | 讀 | Error_I | 0 | 故障代碼 |
| 64:相線接錯、堵轉(zhuǎn)保護 | 0x0040 |
| 17 | 23 | 讀 | 母線電壓 | 0 | 0.1V |
| 128:母線電壓高于50V | 0x0080 |
| 18 | 24 | 讀 | U相電流 | 0 |
|
| 256:編碼器電池掉電 | 0x0100 |
| 19 | 25 | 讀 | V相電流 | 0 |
|
|
|
|
| 1A | 26 | 讀 | 電池電壓 | 0 | 0.1V |
| 變量:EEPROM讀取標志 | DataReadFlag |
| 1B | 27 | 讀 | 電機是否運行 | 0 | 0:空閑 |
| 從eeprom讀取數(shù)據(jù) | 0 |
| 1C | 28 | 讀 |
| 0 |
|
| 將默認值寫進eeprom | 1 |
| 1D | 29 | 讀 |
| 0 |
|
| 更新變量 | 2 |
| 1E | 30 | 讀 | 電流測試 | 0 |
|
| 初始化CAN地址 | 3 |
| 1F | 31 | 讀 | 速度測試 | 0 |
|
| 等待 | 4 |
|
|
|
|
|
|
|
|
|
|
|
| 命令:0012H,以下索引對應電機參數(shù)設定,掉電不丟失, |
|
|
| ||||
| 索引:十六進制 | 索引:十進制 | 讀/寫 | 名稱 | 軸1-3默認參數(shù) | 單位 | 軸 4默認參數(shù) |
|
|
| 0 | 0 | 讀/寫 | 恢復默認值 | 1248 |
| 1235 |
|
|
| 1 | 1 | 讀/寫 | CAN_ID | 1 |
| 1 | 0x300+(1-127) |
|
| 2 | 2 | 讀/寫 | 運行模式 | 3 |
| 3 | 1:電流環(huán);2:速度環(huán); | |
| 3 | 3 | 讀/寫 | 位置環(huán)模式 | 1 |
| 0 | 0:T型加減速; | |
| 4 | 4 | 讀/寫 | 位置環(huán)T型加減速速度 | 2000 | 0.1rpm | 1000 |
|
|
| 5 | 5 | 讀/寫 | 加速度 | 2000 | 0.0001 | 2000 |
|
|
| 6 | 6 | 讀/寫 | 停止加速度 | 20 | 0.01 | 0 |
|
|
| 7 | 7 | 讀/寫 | 電流環(huán)P | 3000 |
| 5000 |
|
|
| 8 | 8 | 讀/寫 | 電流環(huán)I | 35 |
| 20 |
|
|
| 9 | 9 | 讀/寫 | 電流環(huán)D | 0 |
| 0 |
|
|
| A | 10 | 讀/寫 | 速度環(huán)P | 7000 |
| 20000 |
|
|
| B | 11 | 讀/寫 | 速度環(huán)I | 15 |
| 10 |
|
|
| C | 12 | 讀/寫 | 速度環(huán)D | 0 |
| 0 |
|
|
| D | 13 | 讀/寫 | 位置環(huán)P | 2000 | 0.00001 | 2000 |
|
|
| E | 14 | 讀/寫 | 位置環(huán)I | 0 | 0.00001 | 0 |
|
|
| F | 15 | 讀/寫 | 位置環(huán)D | 0 |
| 0 |
|
|
| 10 | 16 | 讀/寫 | 位置誤差給定值 | 1000 | 脈沖 | 0 | 0-30000 |
|
| 11 | 17 | 讀/寫 |
| 0 |
| 0 |
|
|
| 12 | 18 | 讀/寫 |
| 0 |
| 0 |
|
|
| 13 | 19 | 讀/寫 | 速度濾波 | 20 | 10-80 | 10 |
|
|
| 14 | 20 | 讀/寫 | 硬件過流值 | 2800 | 0.01A | 2800 |
|
|
| 15 | 21 | 讀/寫 | 額定電流 | 1500 | 0.01A | 1500 |
|
|
| 16 | 22 | 讀/寫 | 峰值電流 | 2500 | 0.01A | 2500 |
|
|
| 17 | 23 | 讀/寫 | 低壓保護值 | 240 | 0.1V | 240 |
|
|
| 18 | 24 | 讀/寫 | 高壓保護值 | 550 | 0.1V | 550 |
|
|
| 19 | 25 | 讀/寫 | 制動電阻工作電壓 | 500 | 0.1V | 500 |
|
|
| 1A | 26 | 讀/寫 |
|
|
|
|
|
|
| 1B | 27 | 讀/寫 | 堵轉(zhuǎn)電流保護值 | 1500 |
| 0 | 堵轉(zhuǎn)或相線接線保護值 |
|
| 1C | 28 | 讀/寫 |
| 0 |
| 0 |
|
|
| 1D | 29 | 讀/寫 |
| 0 |
| 0 |
|
|
| 1E | 30 | 讀/寫 |
| 0 |
| 0 |
|
|
| 1F | 31 | 讀/寫 |
| 0 |
| 0 |
|
|
九、可能出現(xiàn)的問題及解決辦法
1、電機上電使能后,報64故障;原因:電機相線接錯。
2、電機運行過程中,報64故障;原因:電機負載大,可以修改堵轉(zhuǎn)保護值,默認值為:1500(峰值),適當放大些。
3、電機上電使能后,報32故障;原因:電流環(huán)或速度環(huán)PI參數(shù)不合適;在不影響位置精度的情況下,可以先適當減小速度環(huán)P參數(shù);如果沒有效果,開始減小電流環(huán)P參數(shù)。
4、電機上電使能后,報128故障;原因:開關電源會有一定的紋波,功率越大紋波越大,可以調(diào)低開關電源輸出電壓;或?qū)⒅苿与娮韫ぷ麟妷罕Wo值設高些;默認是50V(500)。
5、電機在運行過程中,有突然停止的情況;原因:電機在測試電流環(huán)或速度環(huán)后,編碼器計數(shù)值太大,在五次多項式計算后,有些參數(shù)可能會溢出。在電機做過電流環(huán)或速度環(huán)測試后,給驅(qū)動器斷電,同時將編碼器電池撥掉再插好。
6、在位置環(huán)運行中,電機加速度過慢; 原因:可以適當減小0011H里,運行時間DF值(默認4000);或加大0011H里,五次式項式時間系數(shù)值(默認1000)。
您感興趣的產(chǎn)品PRODUCTS YOU ARE INTERESTED IN

霍伯納TDP0,09LT-3測速電機TDP0,2LT-4 測速電機商家
TDP0,2LT-4 面議

GMP1.0LS-4+FSL德國霍伯納POG9D1024 測速電機廠家
POG9D1024 面議
TDP0,2LT-4+FSL 電機測速霍伯納德國 測速電機商家
TDP0,2LT-4+FSL 面議
TDPO,O9LT霍伯納電機 TDPO,2LT-4 測速電機廠家
TDPO,2LT-4 面議塑料機械網(wǎng) 設計制作,未經(jīng)允許翻錄必究 .? ? ?
請輸入賬號
請輸入密碼
請輸驗證碼