

暫無信息 |

您好, 歡迎來到塑料機(jī)械網(wǎng)! 登錄| 免費注冊| 產(chǎn)品展廳| 收藏商鋪|
您好, 歡迎來到塑料機(jī)械網(wǎng)! 登錄| 免費注冊| 產(chǎn)品展廳| 收藏商鋪|

13817760416
當(dāng)前位置:上海霖智自動化科技有限公司>> JQD-3汽車座椅穩(wěn)定性測試臺哪家好




| 參 考 價 | 面議 |
產(chǎn)品型號JQD-3
品 牌
廠商性質(zhì)其他
所 在 地上海市
更新時間:2024-11-25 05:52:43瀏覽次數(shù):295次
聯(lián)系我時,請告知來自 塑料機(jī)械網(wǎng)暫無信息 |
1.1. 基本信息
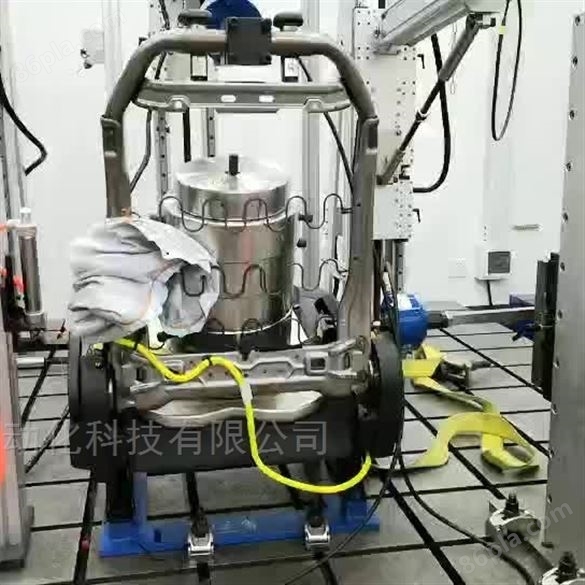
設(shè)備名稱:座椅穩(wěn)定性試驗機(jī)
設(shè)備型號:JQD-3
座椅穩(wěn)定性試驗機(jī)按照YFJC要求定制,可完成座椅骨架和座椅成品的間隙剛度試驗、座椅操作力測量、低載荷間隙剛度試驗(位移小于1mm,力值小于10N)、泡沫特征曲線試驗的測試等試驗。可根據(jù)客戶要求定制!
1.2. 技術(shù)指標(biāo)
1.2.1. 外形尺寸,可根據(jù)實際需求調(diào)整
1) 主機(jī)外形尺寸(橫向×縱向×高):3000×2000×2200mm3;
2) 試驗底平臺:尺寸3000×2000×250mm3 ,T型槽開口在2000mm方向,間距150mm,T型槽寬14mm;
1.2.2. 主機(jī)框架
1) 電動缸垂直時,中橫梁下臺面距離地面1900mm;
2) 中橫梁可上下移動,移動方式為電動,通過手控盒操作,可任意位置鎖緊;
3) 中橫梁上下移動有位移顯示功能,可在軟件中顯示;
4) 試驗框架前后可整體移動,移動方式為電動,通過手控盒操作,總移動距離為1000mm(一邊預(yù)留400mm),可任意位置鎖緊。
1.2.3. 電動缸
1) 推拉力:3000N;
2) 行程:400mm;
3) 速度調(diào)節(jié)范圍:5mm/min至800mm/min;
4) 速度精度:1%;
5) 可左右移動,移動方式為電動,通過手控盒操作,可任意位置鎖緊,有效移動距離為1600mm;
6) 可繞Z軸旋轉(zhuǎn),旋轉(zhuǎn)方式為手動,旋轉(zhuǎn)角度范圍為±45°,可任意角度下固定,旋轉(zhuǎn)松開時有防脫落螺栓保護(hù);
7) 可繞橫梁旋轉(zhuǎn),旋轉(zhuǎn)方式為手動,旋轉(zhuǎn)角度范圍為0°至300°,可任意角度下固定;
8) 電動缸的伸出(分快慢速)、回退(分快慢速)和停止操作可通過手控盒完成,行走速度可通過軟件設(shè)定。
1.2.4. 負(fù)荷傳感器
1) 擁有1個獨立的負(fù)荷采樣通道,可匹配傳感器;
2) 傳感器由YFJC提供,量程范圍為100N至3000N,數(shù)量不限;
3) 對于自身帶信號放大的傳感器可提供供電電源(供電電源類型請事先告知,且傳感器信號輸出要求在-10V至10V之間);
4) 對于自身不帶信號放大器的傳感器可提供對應(yīng)供電及信號放大模塊(在采購前請先將傳感器參數(shù)提供給我方,我方只提供一套信號放大模塊,但會盡可能兼容更多的傳感器,若傳感器型號參數(shù)差異太大可配給不同的信號放大模塊,無兼容性問題)。
1.2.5. 模擬量式位移傳感器(LVDT)
1) 擁有4個獨立的模擬量式位移采樣通道,可匹配傳感器;
2) 傳感器由YFJC提供,量程范圍不限,數(shù)量不限,為達(dá)到試驗匹配應(yīng)盡可能選擇量程與所測位移量接近的傳感器;
3) 對于LVDT位移傳感器可提供供電電源(供電電源類型請事先告知,且傳感器信號輸出要求在-10V至10V之間)。
1.2.6. 編碼器式位移傳感器
1) 擁有2個獨立的編碼器式位移采樣通道,可匹配傳感器;
2) 傳感器由YFJC提供,量程范圍不限,數(shù)量不限,為達(dá)到試驗匹配應(yīng)盡可能選擇分辨率足夠支撐所測位移量的傳感器;
3) 傳感器要求是供電電源為5V的正交編碼器式位移傳感器。
1.2.7. 模擬量式角度傳感器
1) 擁有1個獨立的模擬量式角度采樣通道,可匹配傳感器;
2) 傳感器由YFJC提供,量程范圍不限,數(shù)量不限,為達(dá)到試驗匹配應(yīng)盡可能選擇量程與所測位移量接近的傳感器;
3) 對于自身帶信號放大的傳感器可提供供電電源(供電電源類型請事先告知,且傳感器信號輸出要求在-10V至10V之間);
4) 對于自身不帶信號放大器的傳感器可提供對應(yīng)供電及信號放大模塊(在采購前請先將傳感器參數(shù)提供給我方,我方只提供一套信號放大模塊,但會盡可能兼容更多的傳感器,若傳感器型號參數(shù)差異太大可配給不同的信號放大模塊,無兼容性問題)。
1.2.8. 編碼器式角度傳感器
1) 擁有1個獨立的編碼器式角度采樣通道,可匹配傳感器;
2) 傳感器由YFJC提供,量程范圍不限,數(shù)量不限;
3) 傳感器要求是供電電源為5V的正交編碼器式位移傳感器。
1.2.9. 采樣頻率
200Hz。
1.2.10. AD轉(zhuǎn)換精度
16位。
1.2.11. 測量精度
優(yōu)于±0.5%F·S。
1.2.12. 控制精度
優(yōu)于±0.5%F·S。
1.2.13. 負(fù)荷控制負(fù)荷目標(biāo)方式
控制負(fù)荷超調(diào)量小于加載值的10%,且不低于加載值。
1.2.14. 位移控制位移目標(biāo)方式
控制位移超調(diào)量小于5mm。
1.2.15. 位移控制負(fù)荷目標(biāo)方式
控制負(fù)荷超調(diào)量小于加載值的10%,且不低于加載值;
1.2.16. 控制柜
尺寸由YFJC提供,并增加AC220V、DC12和DC24V電源插口,其位置由YFJC給出。
2.1. 機(jī)械系統(tǒng)
2.1.1. 底平臺
灰鐵(HT250)鑄造,經(jīng)過加工和去磁處理,精度2級,
2.1.2. 試驗框架
立柱采用無縫鋼管精加工而成,橫梁、立柱安裝底座等采用鋼板加工而成,如圖2-3。
2.1.3. 框架前后移動機(jī)構(gòu)
采用鋼板焊接加工而成,移動機(jī)構(gòu)采用電機(jī)自動驅(qū)動,。
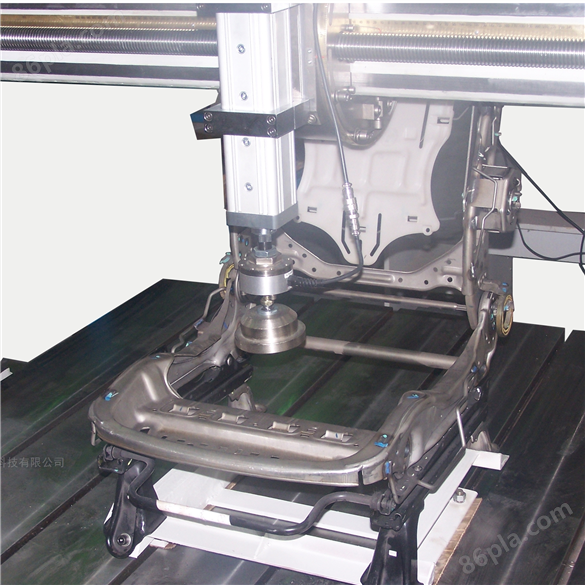
2.1.4. 電動缸升降機(jī)構(gòu)
采用精密滾珠絲桿、驅(qū)動電機(jī)、軸承、移動鎖緊套等組成,。
2.1.5. 電動缸左右移動機(jī)構(gòu)
采用絲桿、驅(qū)動電機(jī)、鎖緊機(jī)構(gòu)等組成,
2.1.6. 電動缸旋轉(zhuǎn)機(jī)構(gòu)
也叫角度調(diào)整機(jī)構(gòu),采用手輪和減速機(jī)手動調(diào)節(jié),配角度刻度尺,
2.2. 電氣控制及采集系統(tǒng)
整個電氣控制及采集系統(tǒng)可分為:電氣拖動系統(tǒng)、伺服電動缸系統(tǒng)、運動控制系統(tǒng)和信號采集系統(tǒng)四部分。
2.2.1. 電氣拖動系統(tǒng)
電氣拖動系統(tǒng)依托于標(biāo)準(zhǔn)機(jī)柜,是整臺設(shè)備電力配給和電氣邏輯控制的核心。所有信號的線材連接都在此部分完成,其在關(guān)鍵部位使用光電隔離式固態(tài)繼電器和高品質(zhì)屏蔽電纜有效減輕伺服電機(jī)系統(tǒng)運作時對控制信號和采樣信號的干擾。
2.2.2. 伺服電動缸系統(tǒng)
伺服電動缸系統(tǒng)用于接收控制電信號并根據(jù)控制信息控制電動缸行走,是整臺設(shè)備動作執(zhí)行部分的核心。
作為執(zhí)行部件的電動缸具有噪音低、節(jié)能、干凈、高剛性、抗沖擊力、超長壽命、操作維護(hù)簡單等特點,可以在惡劣環(huán)境下長期工作,防護(hù)等級可以達(dá)到IP66。且電動缸在復(fù)雜的環(huán)境下工作只需要定期的注脂潤滑,并無易損件需要維護(hù)更換,比液壓系統(tǒng)和氣壓系統(tǒng)減少了大量的售后服務(wù)成本。同時還可以在缸體上安裝前后感應(yīng)式限位開關(guān),配合伺服電機(jī)系統(tǒng)和運動控制系統(tǒng)工作,提高系統(tǒng)安全性。
而作為控制部件的松下伺服電機(jī)系統(tǒng)可方便調(diào)整參數(shù)、監(jiān)視狀態(tài)和分析故障。其強(qiáng)大的智能化自動調(diào)整功能可替代通常的專業(yè)復(fù)雜地調(diào)試過程,輕松完成高速高響應(yīng),速度響應(yīng)頻率可達(dá)1kHz。控制方面,該伺服驅(qū)動器可接收高達(dá)2Mpps的脈沖指令,并內(nèi)置瞬時速度觀測器,可快速、高分辨率地檢測出電機(jī)轉(zhuǎn)速。實際使用中,伺服電機(jī)前端還安裝有減速機(jī),通過減速機(jī)連接到電動缸。
2.2.3. 運動控制系統(tǒng)
運動控制系統(tǒng)的核心部件是NI PCI-7352運動控制卡。其主要特點有:
? 控制周期為250μm
? 從軟件發(fā)送命令至命令得到響應(yīng)最多只需5ms
? 內(nèi)置數(shù)據(jù)采集,可提供200Hz采樣頻率的8路16位模擬輸入
? 64條數(shù)字I/O線
? 以光電隔離接口形式兼容伺服使能、限位信號
? 可通過驅(qū)動函數(shù)設(shè)置前后限位
? 除本身的編碼器主反饋外,其它8路16位模擬輸入都可以用來做控制反饋
? 可通過驅(qū)動函數(shù)設(shè)置PID控制參數(shù)
基于上述優(yōu)點,使用NI PCI-7352運動控制卡作為伺服電動缸的控制,其控制效果好,長期穩(wěn)定性佳,且根據(jù)驅(qū)動函數(shù)自帶的狀態(tài)監(jiān)測可以方便地判斷伺服電機(jī)系統(tǒng)運行狀態(tài),簡化故障排查流程,增加試驗設(shè)備工作效率。
為了使用PCI接口形式板卡,我們采用研華工控機(jī)IPC-610L(300W電源)作為其載體。其特點有:
? 工業(yè)級母板
? 主板AIMB-763VG(5個PCI槽2個PCIE槽2串一并一個網(wǎng)口)
? 含CPUE5300/2G/500G/DVD/KB/MS/
? 前端配備2個 USB,機(jī)箱前面板上的系統(tǒng)狀態(tài) LED 指示燈可顯示電源、硬盤和系統(tǒng)電壓的運行情況
? 有過濾內(nèi)吹冷卻風(fēng)扇,可在整個機(jī)箱內(nèi)維持正的空氣循環(huán)
? 一年上門兩年質(zhì)保
由于這些特點,使得 IPC-610擁有很強(qiáng)的防干擾、防塵、防震、防擾流的能力,為NI PCI-7352穩(wěn)定運行提供了堅實的平臺。
2.2.4. 信號采集系統(tǒng)
信號采集系統(tǒng)分為信號調(diào)理系統(tǒng)和數(shù)據(jù)采集硬件兩部分。
信號采集系統(tǒng)對于模擬量式傳感器由信號放大模塊和抗混疊濾波器組成,而對于編碼器式傳感器則無需增加信號輔助部件。
數(shù)據(jù)采集硬件可分為模擬量信號采集硬件(卡)和編碼器信號采集硬件(卡)兩部分。其中NI PCI-7352內(nèi)置8路模擬量信號采樣通道供系統(tǒng)模擬量采樣使用,而編碼器式信號采樣使用北京阿爾泰公司的PCI2394編碼器采集卡。
2.3. 軟件系統(tǒng)
軟件系統(tǒng)運行于研華工控機(jī)上,通過驅(qū)動函數(shù)與NI PCI-7352或者其它采集卡進(jìn)行交互。其主要特點為:
? 運行于Windows操作系統(tǒng),人機(jī)界面友好,操作簡便,支持中英文界面顯示
? 隱藏了大部分硬件配置參數(shù),只留有用戶需要使用的少量硬件配置參數(shù),簡化用戶操作
? 可在硬件通道支持的范圍內(nèi)配置傳感器系數(shù),調(diào)用方便,互不干涉
? 軟件啟動后實時顯示傳感器采樣瞬時值,試驗時還可顯示傳感器采樣大值和最小值
? 可手動設(shè)置傳感器保護(hù)值(默認(rèn)為對應(yīng)傳感器量程),保護(hù)響應(yīng)時間為5ms
? 可預(yù)置多種試驗曲線數(shù)據(jù)處理方式,由用戶提出并確認(rèn)
? 試驗曲線數(shù)據(jù)處理方式可配合試驗運行參數(shù)形成一個整體的試驗?zāi)K,各種組合設(shè)置靈活,調(diào)用方便,可實現(xiàn)全部參數(shù)的存盤和讀取
? 可提供僅進(jìn)行試驗采樣控制的手動試驗?zāi)J?/span>
? 試驗數(shù)據(jù)以二進(jìn)制形式存儲在文檔中,讀寫速度遠(yuǎn)高于數(shù)據(jù)庫形式,且大大提高連續(xù)記錄數(shù)據(jù)量,減少長時間運行軟件存儲故障率
? 所有試驗數(shù)據(jù)均支持導(dǎo)出至EXCEL表
? 可靈活設(shè)定多種條件檢索試驗記錄
? 可實現(xiàn)多套試驗報告模板并存,根據(jù)實際需要調(diào)用不同模板
? 可用任意2個傳感器采樣信號組成曲線
? 可同時顯示所有傳感器通道的曲線(顏色區(qū)分)
? 在試驗曲線上可進(jìn)行各種條件下的特征點查找
? 在試驗曲線上可進(jìn)行光標(biāo)任意點查找(可與EXCEL導(dǎo)出數(shù)據(jù)匹配)
? 可根據(jù)需要獲得曲線上任意點的切線數(shù)據(jù)
? 可對曲線中進(jìn)行任意傳感器信號進(jìn)行處理顯示
請輸入賬號
請輸入密碼
請輸驗證碼
掃一掃訪問手機(jī)商鋪
以上信息由企業(yè)自行提供,信息內(nèi)容的真實性、準(zhǔn)確性和合法性由相關(guān)企業(yè)負(fù)責(zé),塑料機(jī)械網(wǎng)對此不承擔(dān)任何保證責(zé)任。
溫馨提示:為規(guī)避購買風(fēng)險,建議您在購買產(chǎn)品前務(wù)必確認(rèn)供應(yīng)商資質(zhì)及產(chǎn)品質(zhì)量。

 塑料機(jī)械網(wǎng)
塑料機(jī)械網(wǎng)