注塑機(jī)機(jī)械手的運(yùn)作方式
注塑機(jī)機(jī)械手是現(xiàn)代塑料工廠機(jī)械生產(chǎn)的主體,也是企業(yè)進(jìn)入智能化機(jī)械自動(dòng)化時(shí)代的標(biāo)志。
注塑機(jī)機(jī)械手雖然只能靠我們的雙手實(shí)現(xiàn)一些基本操作,但其內(nèi)部結(jié)構(gòu)非常復(fù)雜,技術(shù)含量非常高。我們來(lái)看看注塑機(jī)機(jī)械手的運(yùn)作方式
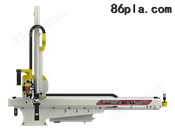
1.直移型
這種社會(huì)運(yùn)動(dòng)發(fā)展型式的機(jī)械手其臂部只具有沿三個(gè)直角坐標(biāo)作直線通過(guò)移動(dòng)的活動(dòng)度,即臂部?jī)H僅作彈性升降和平移等運(yùn)動(dòng),它的運(yùn)動(dòng)市場(chǎng)規(guī)模的圖形可所以條直線個(gè)矩形基礎(chǔ)平面或個(gè)長(zhǎng)方體.這種結(jié)構(gòu)型式的機(jī)械手設(shè)計(jì)布局以及簡(jiǎn)略,運(yùn)動(dòng)更加直觀性強(qiáng),便于完結(jié)必定的精度不同需求,但其占有的空間相對(duì)方位大相應(yīng)的工作人員規(guī)模影響較小。
2.反轉(zhuǎn)型
該類型注塑機(jī)機(jī)械手的手臂具有水平反轉(zhuǎn)的運(yùn)動(dòng)范圍,它與手臂的彈性和手臂的運(yùn)動(dòng)范圍相結(jié)合,形成一個(gè)完整的反向變換機(jī)械手。
與直移機(jī)器人相比,反變型機(jī)器人具有運(yùn)動(dòng)性強(qiáng)、空間小、布局緊湊、工作范圍更廣等優(yōu)點(diǎn)。然而,這種機(jī)器人通常受到提升布局的限制,通常不能在地面上獲得碎片。
3.俯仰型
這種注塑機(jī)機(jī)械手的手臂不僅具有水平翻轉(zhuǎn)的活動(dòng)度,還具有手臂俯仰的活動(dòng)度。這兩個(gè)活動(dòng)度和手臂的彈性活動(dòng)度構(gòu)成了一個(gè)完美的俯仰機(jī)械手。它的運(yùn)動(dòng)稱為俯仰球,它的運(yùn)動(dòng)稱為俯仰球。通常,手臂俯仰但沒(méi)有手臂反向運(yùn)動(dòng)的機(jī)械手被稱為俯仰式,因?yàn)槠洳季纸咏┭鍪健?/span>
與倒置式機(jī)械手相比,俯仰式機(jī)械手可以擴(kuò)大工作范圍,將手臂伸向地面,完成從地面獲取工作的任務(wù)。其缺點(diǎn)是視覺(jué)運(yùn)動(dòng)差,布局凌亂,手臂有兩個(gè)反向運(yùn)動(dòng),導(dǎo)致手臂末端定位誤差隨著手臂的伸展而擴(kuò)大。
4.屈伸型
這種移動(dòng)機(jī)械手的手臂有大臂和小臂兩部分。除了大臂的水平反轉(zhuǎn)和俯仰活動(dòng)外,小臂相對(duì)于大臂也有俯仰運(yùn)動(dòng)。從形體上看,小臂相對(duì)于大臂做屈伸運(yùn)動(dòng),根據(jù)這一特點(diǎn)稱為屈伸型,其運(yùn)動(dòng)尺度圖形為球體。
它具有發(fā)展與人體上肢更類似的布局,能夠在以臂部更大范圍擴(kuò)展長(zhǎng)度為半徑的球體規(guī)模內(nèi)獲取一個(gè)工件,靈活性可以很大;與其它企業(yè)類型分析比較研究占有市場(chǎng)空間也小,工作人員規(guī)模大,并且我們能夠通過(guò)繞過(guò)障礙物信息獲取工件;但其運(yùn)動(dòng)更加直觀性更差,臂部前端方位是由幾個(gè)轉(zhuǎn)角斷定的,因而要到達(dá)要求較高的方位精度時(shí),注塑機(jī)機(jī)械手制作。

會(huì)員1.png)





 QQ:2568841715
QQ:2568841715