






自反力加載試驗(yàn)系統(tǒng)


1.自反力加載試驗(yàn)系統(tǒng)
1)前法蘭安裝,單出桿結(jié)構(gòu),zuida壓縮荷載3000kN,zuida拉伸荷載500kN,滿荷載對(duì)應(yīng)的工作壓力25MPa,油缸耐壓30MPa,活塞行程300mm,啟動(dòng)壓力0.1MPa
2)內(nèi)置安裝磁置伸縮式位移傳感器,帶降噪蓄能器,配套輪輻式荷載傳感器和加載球鉸。
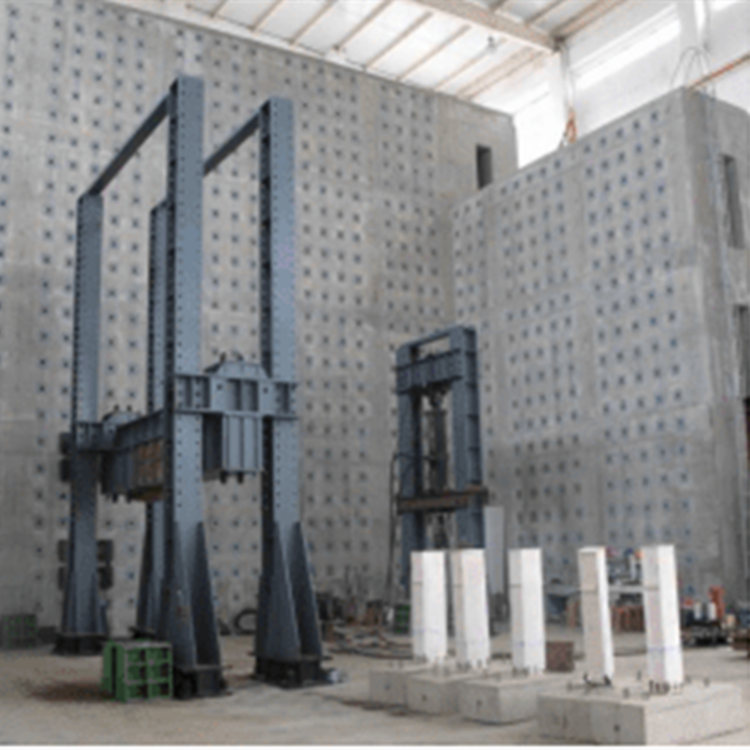
2.自反力自爬升加載架
1)主框架采用四立柱門式自反力結(jié)構(gòu),立柱采用焊接槽型結(jié)構(gòu),底梁采用箱型結(jié)構(gòu),上橫梁采用中間鏤空的雙梁結(jié)構(gòu)。立柱與橫梁通過高強(qiáng)螺栓連接,橫梁高度可按模數(shù)調(diào)整。底梁頂面及側(cè)面均布安裝孔。上橫梁底面通長(zhǎng)安裝直線導(dǎo)軌,導(dǎo)軌上安裝可任意移動(dòng)的小車平臺(tái),小車平臺(tái)可隨動(dòng)也可鎖緊。
2)加載架整體尺寸:長(zhǎng)度6000mm,寬度1800mm,高度7000mm(地下埋深1000mm);加載架凈空間:長(zhǎng)度4000mm,寬度1800mm,高度4000mm。軸壓實(shí)驗(yàn)承載力5000kN,壓剪實(shí)驗(yàn)豎向承載力3000kN,水平承載力1500kN。
3)加載架單塊蓋板的跨中承載力100kN;
4)自升降系統(tǒng),采用自爬升系統(tǒng)帶多通道控制器,可控制伺服電機(jī)同步升降;采用絲杠立柱副結(jié)構(gòu),絲杠直徑180mm,只受豎向荷載時(shí)只靠絲杠能承受5000kN豎向荷載。采用伺服電機(jī)驅(qū)動(dòng)螺旋升降機(jī)構(gòu)控制橫梁升降。配置至少四個(gè)位移傳感器,用于同步控制,提升速度90mm/min,自升降系統(tǒng)立柱四個(gè)測(cè)點(diǎn)的位移差值0.2mm
豎向液壓加載油缸
3.拉壓力傳感器
用于結(jié)構(gòu)試驗(yàn)中測(cè)量實(shí)驗(yàn)荷載,采用輪輻式結(jié)構(gòu),量程3000kN,線性度0.05%
4.水平伺服作動(dòng)器
1)可前法蘭、后法蘭安裝,雙出桿結(jié)構(gòu),zuida拉伸、壓縮荷載1000kN,滿荷載對(duì)應(yīng)的工作壓力25MPa,油缸耐壓30MPa,活塞行程500mm,啟動(dòng)壓力0.1MPa。
2)內(nèi)置安裝磁置伸縮式位移傳感器,配套伺服閥,帶降噪蓄能器,配套輪輻式荷載傳感器,前端后端均配置加載鉸板。
5.水平作動(dòng)器安裝板
用于連接水平油缸,可沿立柱任意調(diào)整安裝高度。
7.電液伺服控制系統(tǒng)
1)主要用于控制伺服作動(dòng)器,可單通道控制也可多通道同步協(xié)調(diào)控制。
2)可實(shí)現(xiàn)荷載、位移、實(shí)驗(yàn)數(shù)據(jù)等閉環(huán)伺服控制,實(shí)驗(yàn)過程中可切換。
3)伺服控制4通道,控制信號(hào)可任意設(shè)置;系統(tǒng)靜態(tài)控制精度0.5%FS。
4)與多通道控制子站配合使用,豎向加載采用雙缸協(xié)同加載,采用觸摸屏控制界面,可實(shí)驗(yàn)荷載、位移雙閉環(huán)控制,可確保實(shí)驗(yàn)過程中壓梁始終保持水平,壓梁兩端高差0.2mm,通過主動(dòng)控制方案達(dá)到建研式加載效果。









